
0x00 RP2040 外设概述
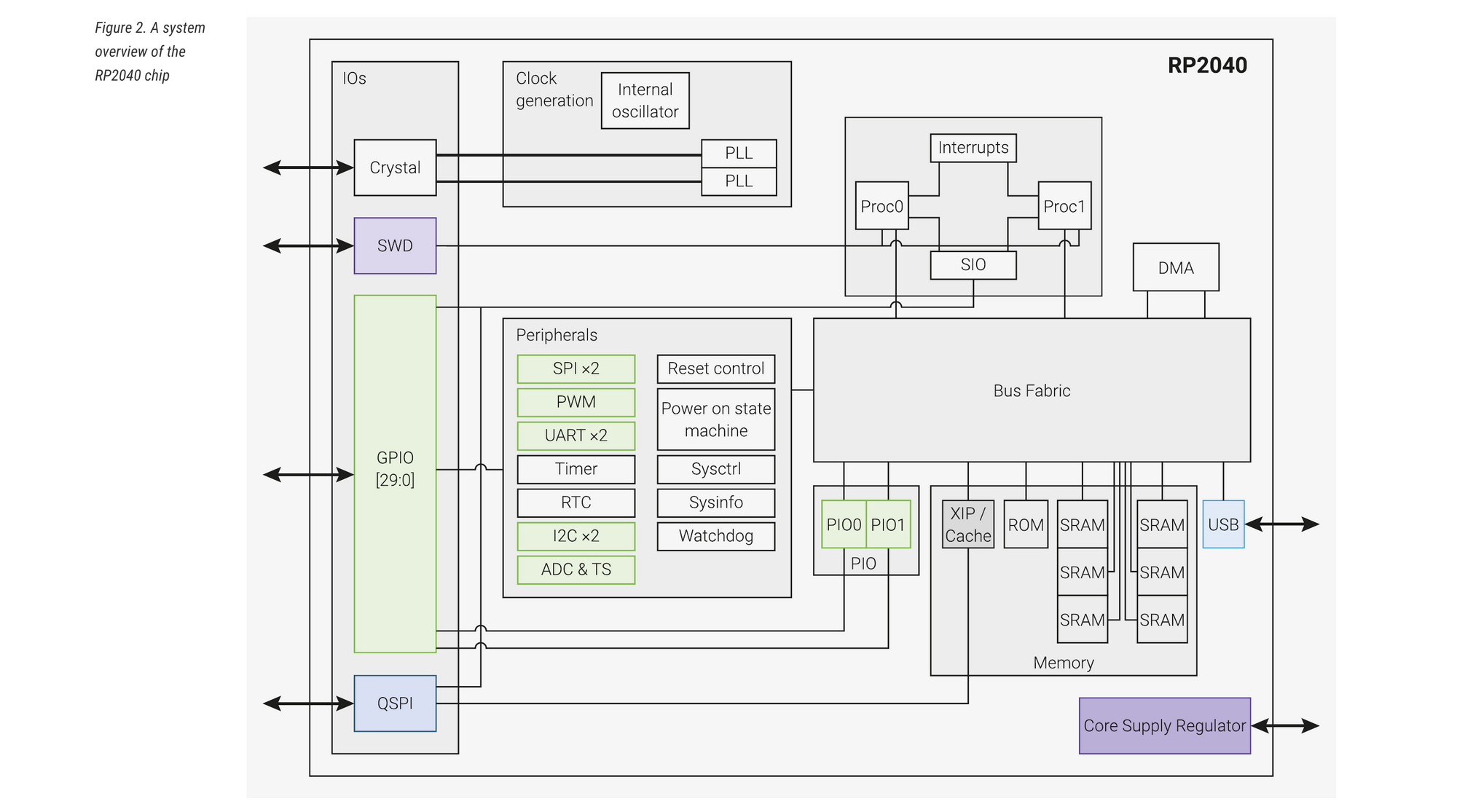
上一篇文章中,我们已经从 data brief 得知 RP2040 拥有两个串口、两个 SPI、两个 I2C、16 个 PWM、一个 USB 1.1 以及 8 个 PIO。本文将讨论一些常用的外设。从下图中可以看到,这些外设一方面与 GPIO 连接,一方面连到 bus fabric,以与处理器通讯。
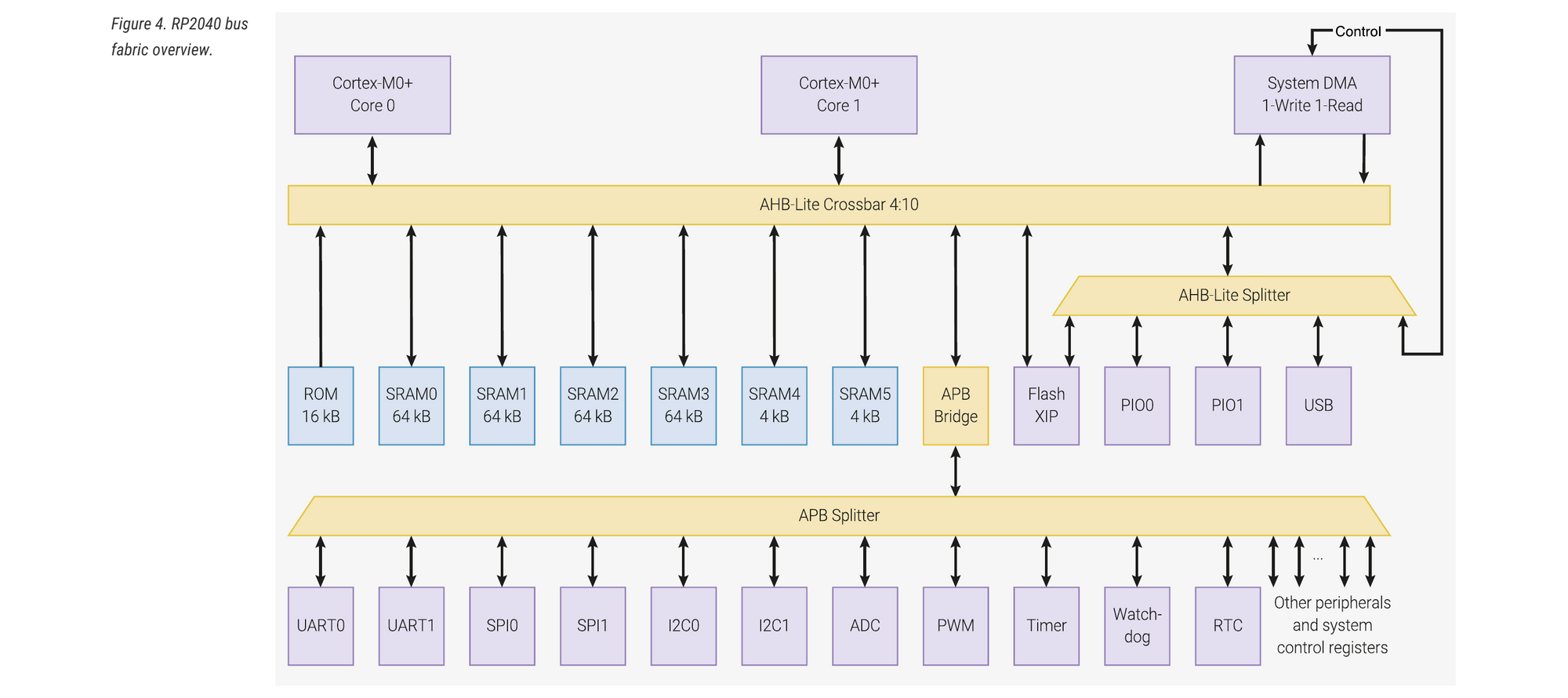
根据文档,bus fabric 内部是如此实现的:AHB-Lite crossbar 在 4 个上游(处理器核、DMA)与 10 个下游(内置 ROM、6 个 SRAM、APB Brigdge、Flash XIP、AHB Lite Splitter)之间传输地址和数据,每个时钟周期内可以发生 4 次传输。APB Bridge 连接到 UART、SPI 等低速外设。
RP2040 的 SRAM 分为 6 个 bank,其中 4 个 64kB 的 bank 是主内存。从
0x20000000 开始的地址空间,会被以 4 byte 为单位轮流映射到这 4 个 bank 中,以提升并行能力。具体可参考 datasheet 2.6. Memory 章节。Single-cycle IO 并未接入 bus fabric。它是与处理器直接连接的。
RP2040 的地址空间如下表:
| 设备 | 地址 | 备注 |
|---|---|---|
| ROM | 0x00000000 | RP2040 的内置 16kB ROM |
| XIP | 0x10000000 | 外置 flash |
| SRAM | 0x20000000 | 6个SRAM bank |
| APB Peripherals | 0x40000000 | 低速外设(UART、I2C 等) |
| AHB-Lite Peripherals | 0x50000000 | 高速外设(USB、PIO、XIP) |
| IOPORT Registers | 0xd0000000 | Single-cycle IO |
| Cortex-M0+ internal registers | 0xe0000000 |
本文将对这些低速外设进行实验。
0x01 串口
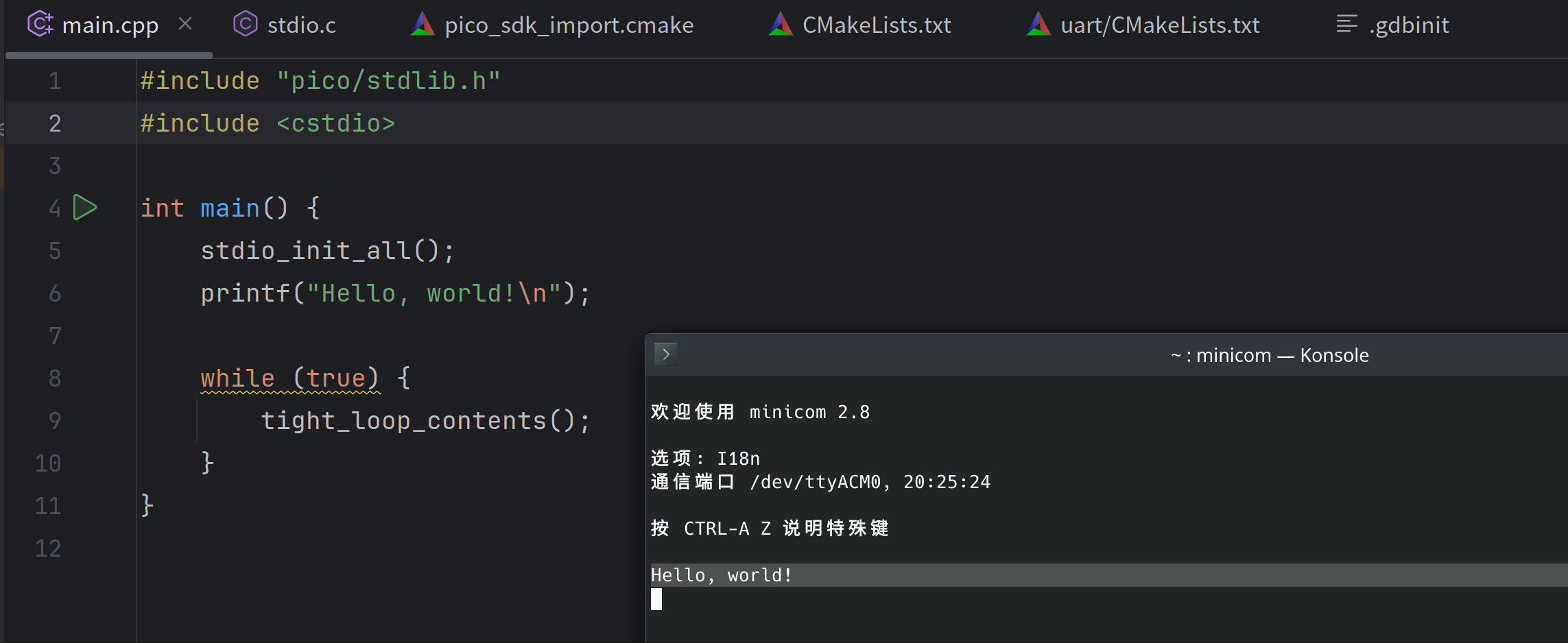
得益于 pico sdk,我们可以直接使用 printf 等函数来在串口上输出,如同运行在电脑上的普通程序那样。代码如下:
#include "pico/stdlib.h"
#include <cstdio>
int main() {
stdio_init_all();
puts("Hello, world!");
while (true) {
tight_loop_contents();
}
}
将 debug probe 的 RX/TX 连接到开发板的 TX/RX,使用 minicom -b 115200 -D /dev/ttyACM0 或 gtkterm 以查看串口。
特殊地,pico sdk 还帮我们实现了基于 usb 协议的串口。要打开这个功能,我们只需修改 CMakelists.txt,加入这一行:
pico_enable_stdio_usb([项目名] 1)此时,stdio_init_all() 就会帮我们初始化 usb 串口。
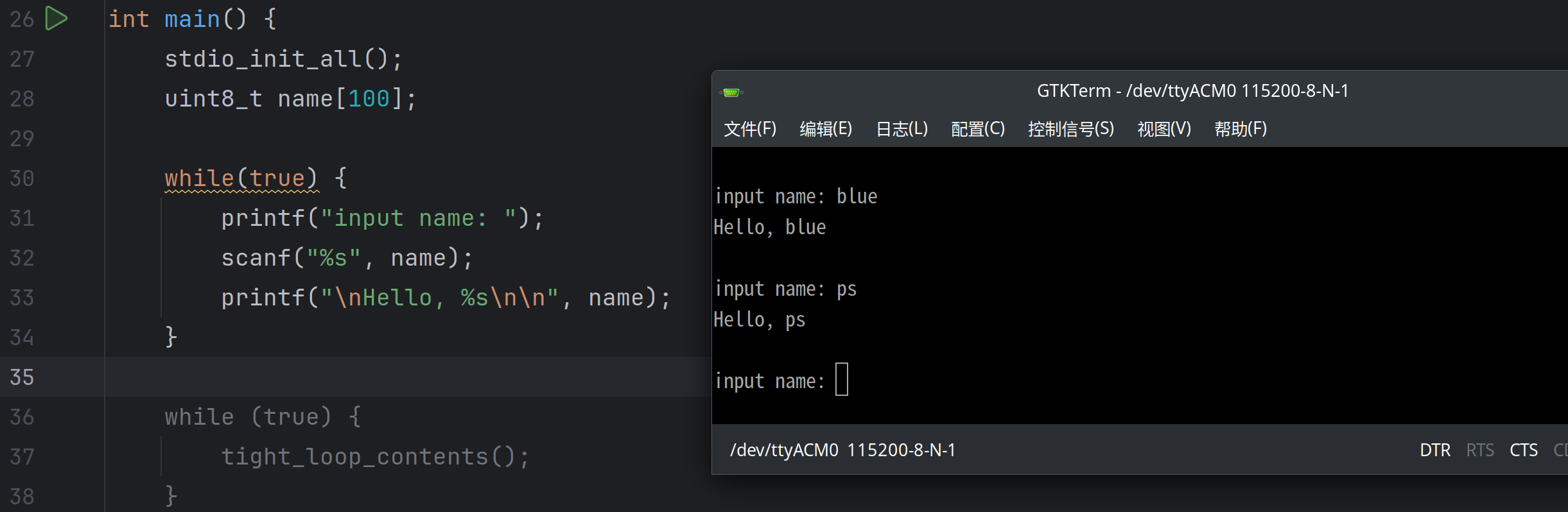
stdio_init_all() 函数的作用是初始化所有串口信道,包括 uart 和 usb。开发者也可以通过 stdio_uart_init() 和 stdio_usb_init() 来自行初始化。而 scanf() 也是可用的,于是我们可以从电脑向 RP2040 发送数据:
while(true) {
printf("input name: ");
scanf("%s", name);
printf("\nHello, %s\n\n", name);
}
0x02 ADC 和温度传感器
RP2040 中有一个 ADC,它有五个输入源:GPIO26~29,以及内置的温度传感器。ADC 采样率为 500 kS/s(事实上可以超频,见这篇文章),分辨率为 12 bit,带一个 FIFO(能容纳 4 条结果)。片内只有一个 ADC,不过我们可以轮询读取各个输入源。
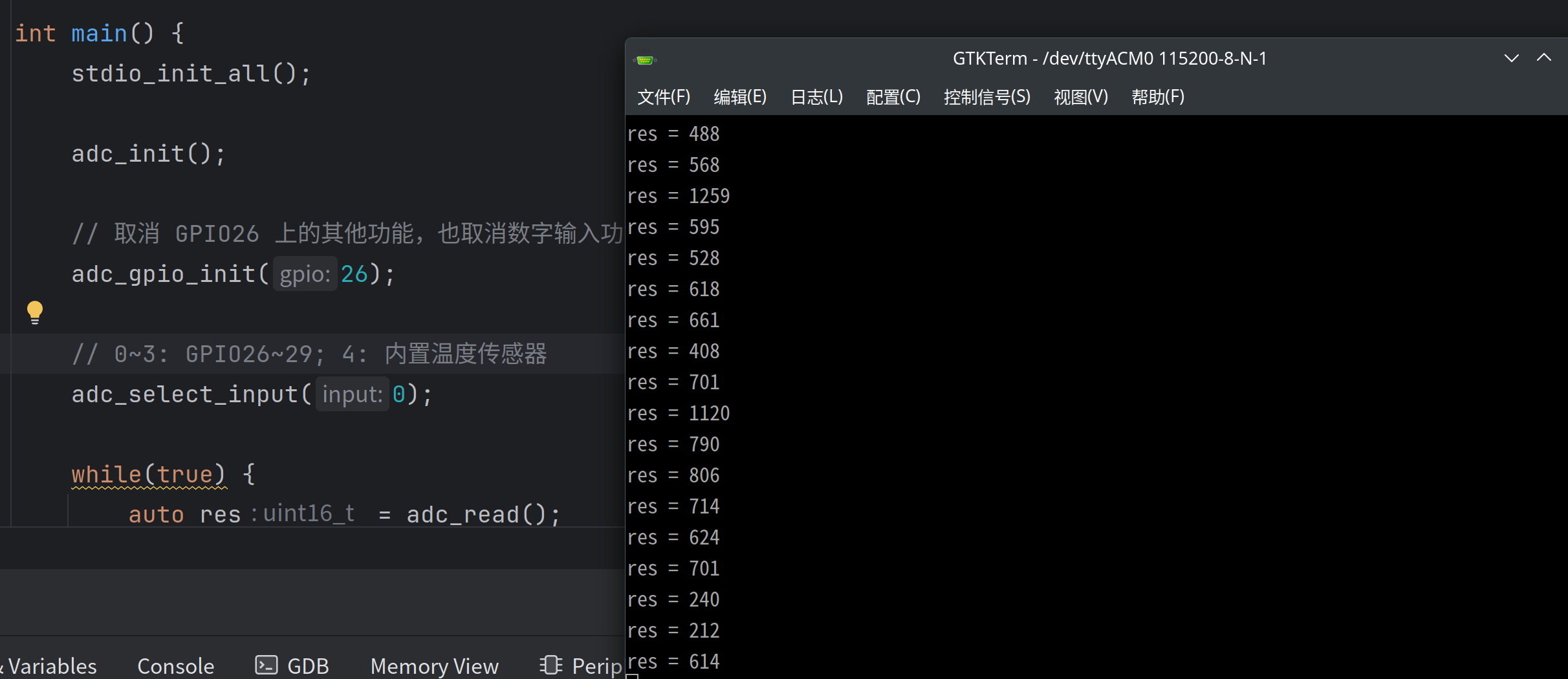
写个代码测试一下 GPIO26 ADC。笔者手头没有信号发生器,所以直接测悬空引脚的电压,测量过程中用手按压引脚。代码:
#include "pico/stdlib.h"
#include "hardware/adc.h"
#include <cstdio>
int main() {
stdio_init_all();
adc_init();
// 取消 GPIO26 上的其他功能,也取消数字输入功能
adc_gpio_init(26);
// 0~3: GPIO26~29; 4: 内置温度传感器
adc_select_input(0);
while(true) {
auto res = adc_read();
printf("res = %d\n", res);
sleep_ms(100);
}
}
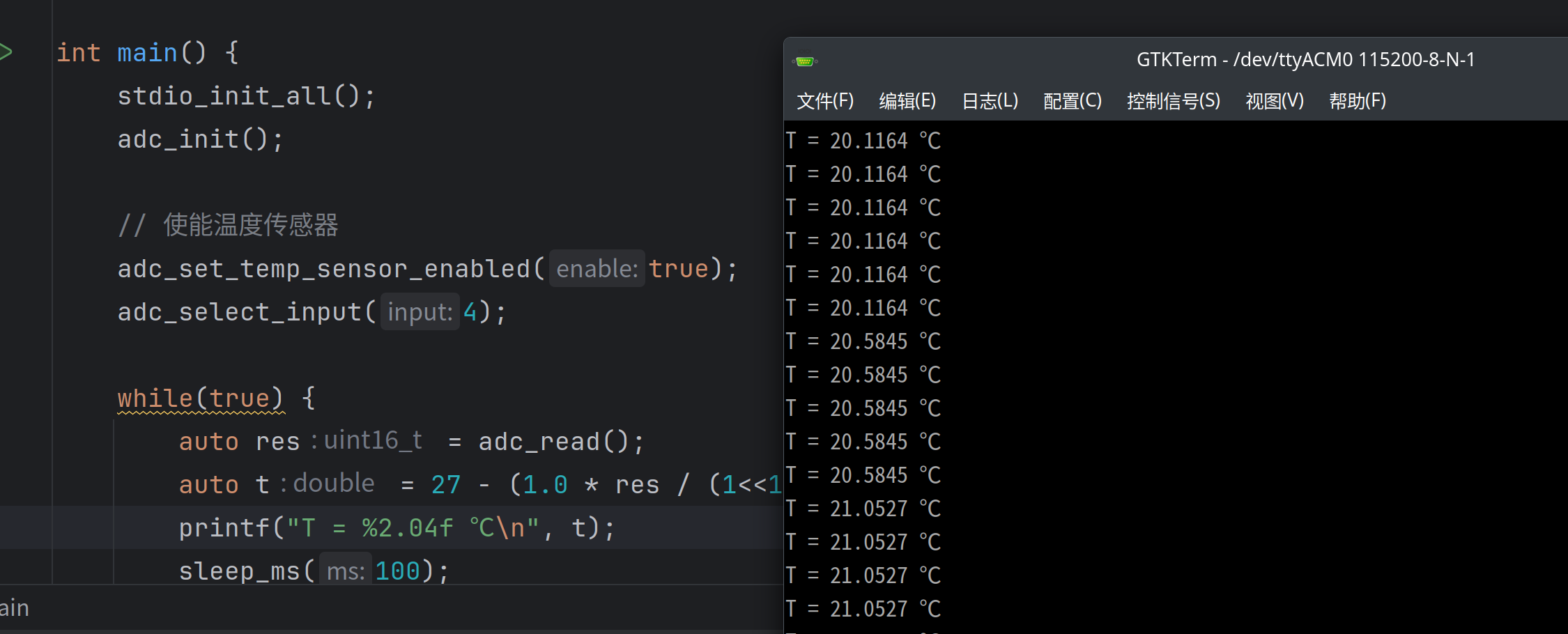
hardware_adc 库:target_link_libraries(adc pico_stdlib hardware_adc)如果要用 ADC 测量芯片温度,则需要将输入源设为 4,并启用温度传感器。温度值可以通过文档中给出的公式计算。代码如下:
int main() {
stdio_init_all();
adc_init();
// 使能温度传感器
adc_set_temp_sensor_enabled(true);
adc_select_input(4);
while(true) {
auto res = adc_read();
auto t = 27 - (1.0 * res / (1<<12) * 3.3 - 0.706) / 0.001721;
printf("T = %2.04f ℃\n", t);
sleep_ms(100);
}
}
0x03 PWM
前一篇文章,我们已经软件实现了 PWM。然而,由软件来做这件事并不可靠,因为 cpu 可能会突然跑去处理中断;如果使用了 RTOS,还会切换任务。使用 PWM 外设则不存在这些问题,它不占用 cpu 时间。
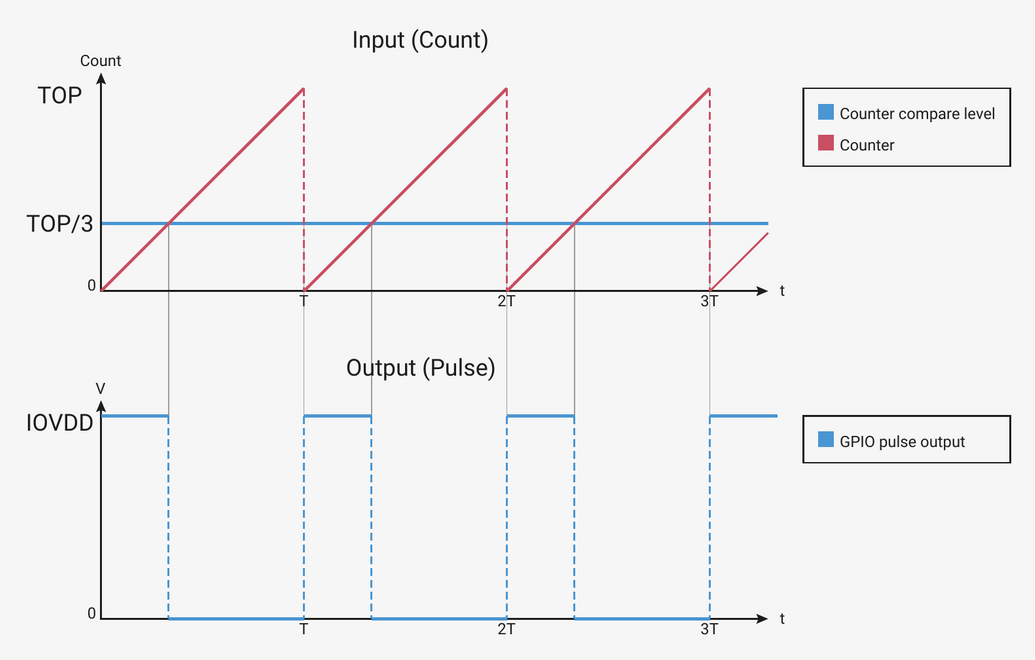
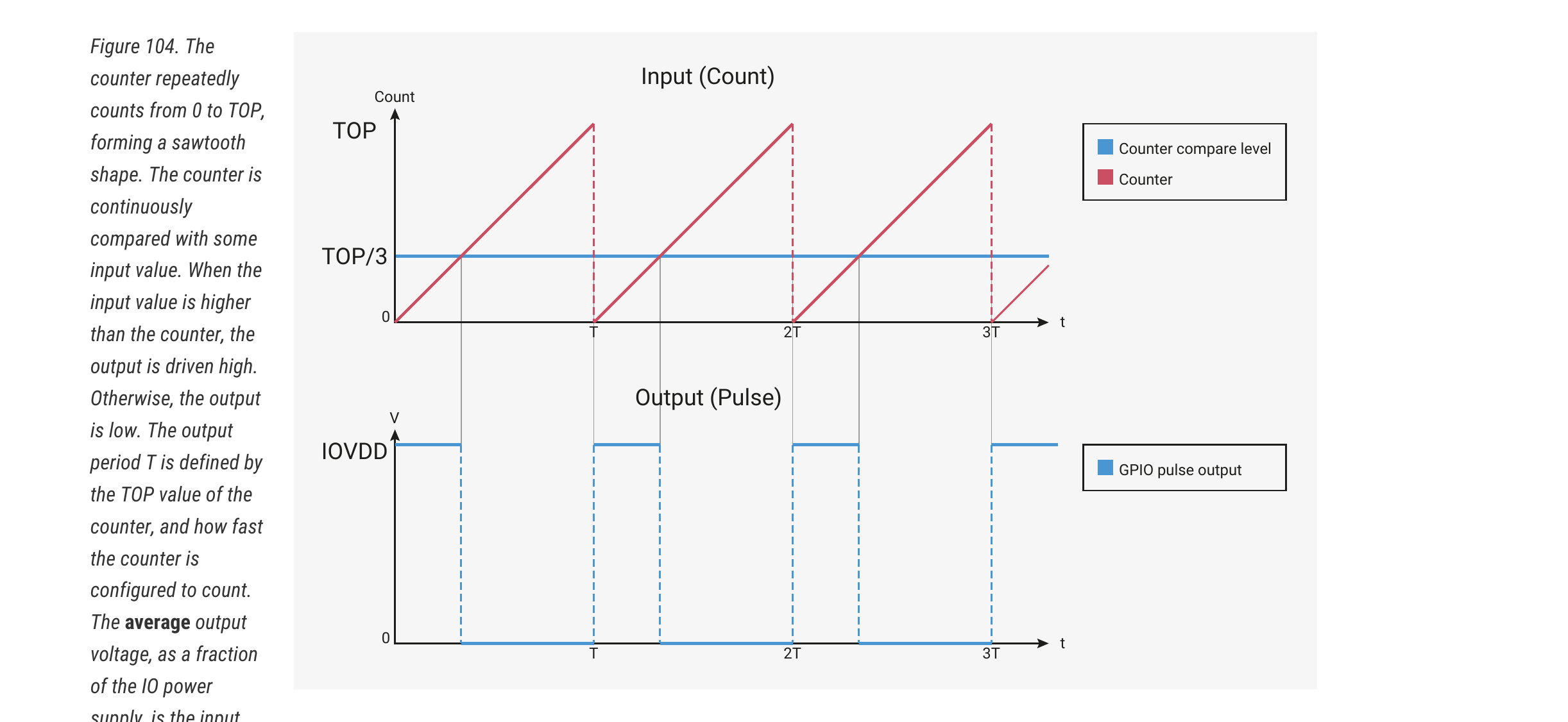
RP2040 有 8 个 PWM slice,每个 slice 可以驱动两条输出信号,也能测量输入信号的频率或占空比。详细的机制可以参考 datasheet。简而言之,普通情况下,PWM 有一个计数器,随着时钟周期而增加;当计数器低于一个预设的 level 时,输出高电平,否则输出低电平。可参考文档中的图:
每个 GPIO 都可以被 PWM 驱动。PWM channel 的分配表如下:

现在我们试试利用 PWM 来快速翻转 GPIO6,从表中可知它对应的 PWM channel 是 3A。代码如下:
// GPIO6: channel 3A
gpio_set_function(6, GPIO_FUNC_PWM);
// 计数器范围:[0, 1]
pwm_set_wrap(3, 1);
// cnt < 1 时,输出高电平,否则输出低电平
pwm_set_chan_level(3, PWM_CHAN_A, 1);
// 使能
pwm_set_enabled(3, true);使用 1GHz 逻辑分析仪(阈值电压 1.7V)可以看到,输出的波形周期为 16ns,每次高电平/低电平持续时长是 8ns。
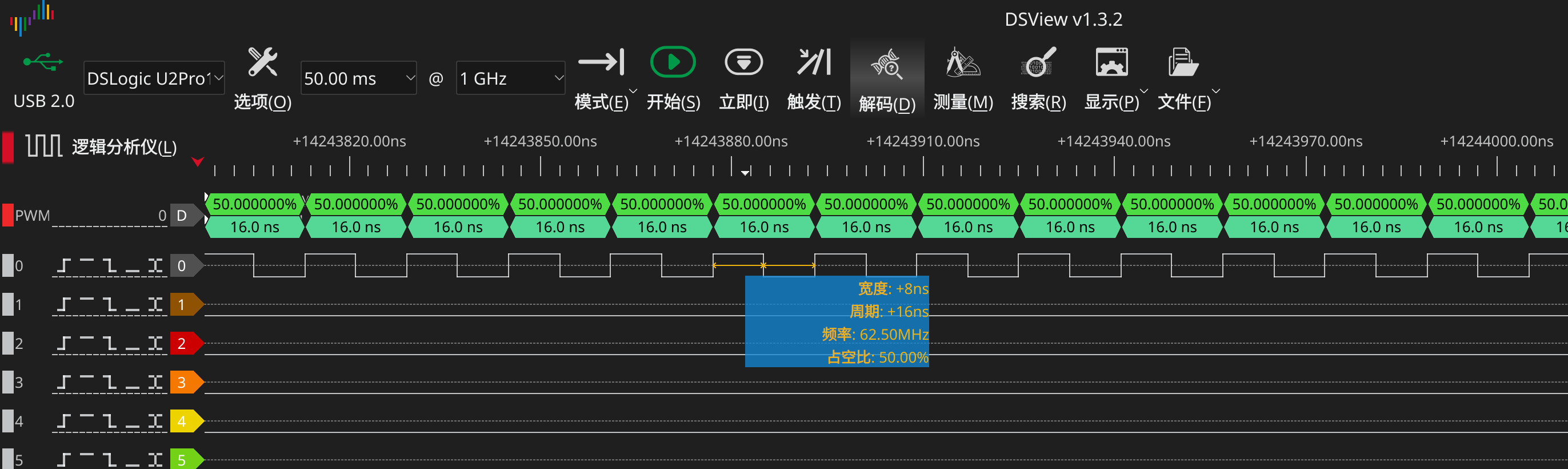
RP2040 的默认主频是 125MHz,时钟周期是 8ns,所以 PWM 实际上在每个时钟周期都完成了一次翻转。这比我们软件实现要可靠许多。
现在,利用 PWM 外设来重新实现上一篇文章做过的呼吸灯。要调整占空比为 $x\%$,只需要将计数器范围设为 $[0, 100]$,将 level 设为 $x$。代码如下:
#include "pico/stdlib.h"
#include "hardware/pwm.h"
#include "pico/stdlib.h"
// GPIO25 是 LED,GPIO6 接到逻辑分析仪
static const uint pins[] = {6, 25};
// 通过 PWM 外设控制亮度
void set_bright(uint bright) {
for(auto pin: pins) {
auto slice_num = pwm_gpio_to_slice_num(pin);
auto chan = pwm_gpio_to_channel(pin);
pwm_set_chan_level(slice_num, chan, bright);
}
}
void keep_bright_for_10ms(uint bright) {
auto stop_time = make_timeout_time_ms(10);
while(!time_reached(stop_time)) {
set_bright(bright);
}
}
int main() {
for(auto pin: pins) {
auto slice_num = pwm_gpio_to_slice_num(pin);
auto chan = pwm_gpio_to_channel(pin);
gpio_set_function(pin, GPIO_FUNC_PWM);
pwm_set_wrap(slice_num, 100);
pwm_set_chan_level(slice_num, chan, 0);
pwm_set_enabled(slice_num, true);
}
while(true) {
// 每 10ms 改变一次亮度级别
for(uint b=1; b<=99; b++) {
keep_bright_for_10ms(b);
}
for(uint b=99; b>=1; b--) {
keep_bright_for_10ms(b);
}
}
}这份代码输出的波形,实测周期是 808ns,比前一篇文章的 100us 细得多,且 PWM 外设不会像 sleep_us() 那样阻塞 cpu,现在配置完之后就可以去干别的活。
0x04 时钟
RP2040 可以将自己的时钟信号输出到 GPIO,以便为其他设备提供时钟信号。下面的代码把用于 usb 的 48MHz 信号输出到 GPIO21:
clock_gpio_init(21, CLOCKS_CLK_GPOUT0_CTRL_AUXSRC_VALUE_CLK_USB, 1);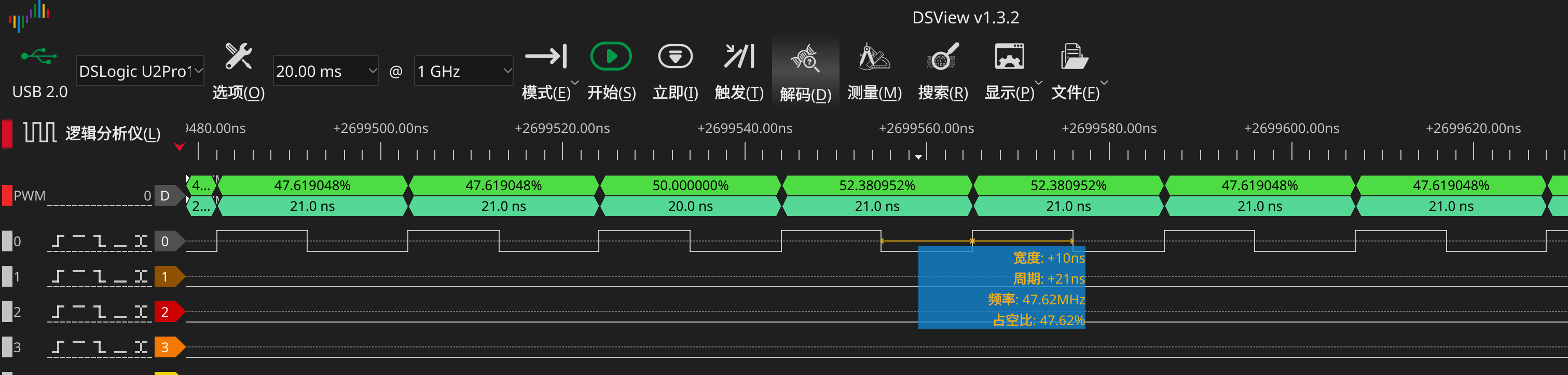
这个方法也可以用于输出 125MHz 的主时钟、12MHz 的晶振等,支持分频。
0x05 I2C
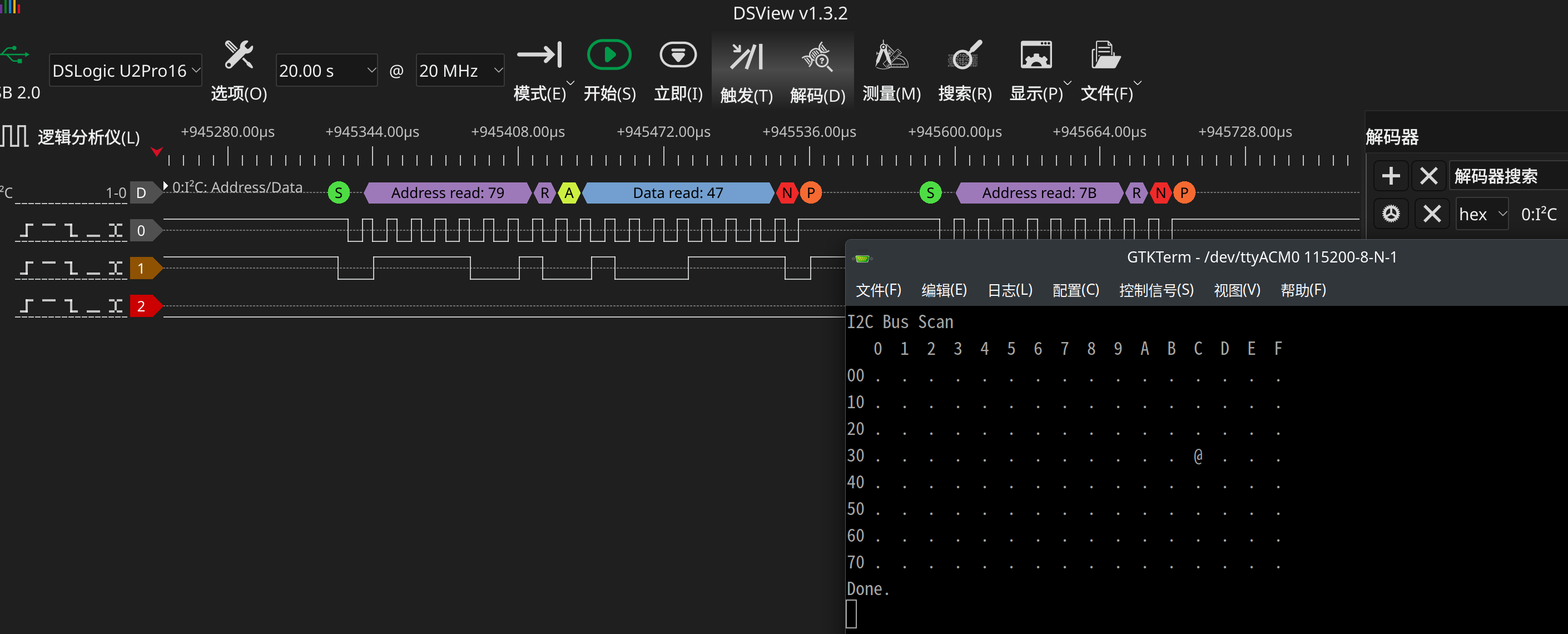
现在来讨论 I2C 外设。笔者用一块 0.96 英寸 OLED 屏作为实验对象,这块屏幕使用 SSD1315 芯片,分辨率是 128x64。先跑一遍 pico-examples 里面的 I2C 总线扫描代码:
int main() {
// Enable UART so we can print status output
stdio_init_all();
// This example will use I2C0 on the default SDA and SCL pins (GP4, GP5 on a Pico)
i2c_init(i2c_default, 100 * 1000);
gpio_set_function(PICO_DEFAULT_I2C_SDA_PIN, GPIO_FUNC_I2C);
gpio_set_function(PICO_DEFAULT_I2C_SCL_PIN, GPIO_FUNC_I2C);
gpio_pull_up(PICO_DEFAULT_I2C_SDA_PIN);
gpio_pull_up(PICO_DEFAULT_I2C_SCL_PIN);
// Make the I2C pins available to picotool
bi_decl(bi_2pins_with_func(PICO_DEFAULT_I2C_SDA_PIN, PICO_DEFAULT_I2C_SCL_PIN, GPIO_FUNC_I2C));
printf("\nI2C Bus Scan\n");
printf(" 0 1 2 3 4 5 6 7 8 9 A B C D E F\n");
for (int addr = 0; addr < (1 << 7); ++addr) {
if (addr % 16 == 0) {
printf("%02x ", addr);
}
// Perform a 1-byte dummy read from the probe address. If a slave
// acknowledges this address, the function returns the number of bytes
// transferred. If the address byte is ignored, the function returns
// -1.
// Skip over any reserved addresses.
int ret;
uint8_t rxdata;
if (reserved_addr(addr))
ret = PICO_ERROR_GENERIC;
else
ret = i2c_read_blocking(i2c_default, addr, &rxdata, 1, false);
printf(ret < 0 ? "." : "@");
printf(addr % 16 == 15 ? "\n" : " ");
}
printf("Done.\n");
while(true) {
tight_loop_contents();
}
}
I2C 协议使用两条线(时钟 SCL、数据 SDA),两条线都上拉。通讯采用请求 - 响应模式,具体如下:
- 主机拉低 SDA,随后拉低 SCL,表示通讯开始(这是 start 信号)
- 传递若干个 frame(注意不是边沿触发,而是电平触发,在 SCL 从上升到下降的全程间,SDA 都需要保持不变)
- 主机拉高 SCL,随后拉高 SDA(这是 stop 信号)
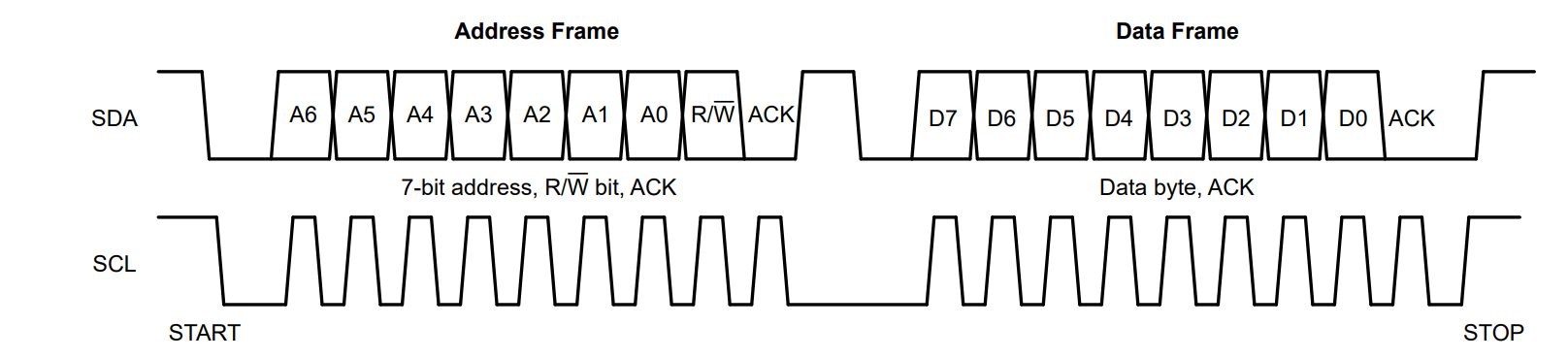
每次通讯,首先发一个 address frame,然后是若干个 data frame。每个 frame 都是 8bit,接收完成之后需要拉低 SDA 表示 ACK。address frame 包含了 7bit 的从机地址和 1bit 的 R/W 标签,1 表示读取,0 表示写入。因此,要扫描 I2C 总线上的 slave 设备,只需要对每个地址发送一个读取请求,看看有无 ACK 信号。
查阅 SSD1315 手册,发现我们屏幕的 I2C 地址是 0b0111100。试试从这个设备读取 2 字节:
i2c_read_blocking(i2c_default, slave_addr, rxdata, 2, false);
可见 RP2040 的 I2C 外设似乎不会给最后一个 frame 回复 ACK 信号。发送以下代码可以点亮屏幕:
const uint8_t cmd_init[] = {
0xae,0x00,0x10,0x40,0x81,0xcf,0xa1,0xc8,0xa6,0xa8,
0x3f,0xd3,0x00,0xd5,0x80,0xd9,0xf1,0xda,0x12,0xdb,
0x40,0x20,0x00,0x8d,0x14,0xa4,0xa6,0xaf
};
i2c_write_blocking(i2c_default, slave_addr, cmd_init, sizeof(cmd_init), false);